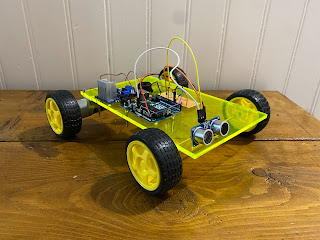
Week Three Progress: A lot of time this week was spent trying to find ways to make the metal detector more sensitive. There were two main ways; increasing the number of turns in the coil, or increasing the current in the coil. For the time being, we decided to focus on increasing the turns in the wire as it was more accessible. We made many different coils so that we could test them and find out which would work best. This week, we also made a basic chassis design for robot. It included holes so that the different componentsw of the robot could be attached to the chassis as well as a couple pieces that allow the front pair of wheels to be attached. Problems/ Concerns: Having a strong enough metal detecting circuit is a concern for the lab inspection day. We need to find a way to mount the actual coil to the chassis. Plan for Week Four: By the end of next week, we need to have a fully functional metal detecting robot. This means that the metal ...